Vaxö del 4 – Motor och radioinstallation, och påbörjad överbyggnad
Vaxö-bygget ska resultera i en radiostyrd modell i skala 1:38 av Waxholmsbolagets M/S Vaxö. Det ger en modell med måtten 100 x 20 cm. Den stora utmaningen är vikten. Den körklara modellen får väga knappt 2½ Kg. Drivlinan med tre drivmotorer, bogpropeller, fyra fartreglage, axlar, batterier, etc, kommer att lägga beslag på huvuddelen av den totala vikten. Det här är del fyra i en serie med ett ännu så länge okänt antal byggrapporter.
Drygt fem kvartal har gått sedan senaste rapporten om Vaxö-bygget, mest beroende på att byggtakten större delen av tiden varit väldigt låg. Vid sommarens tävlingar har jag fått många frågor (nåja, tvåsiffrigt i alla fall) om hur det går och när nästa rapport kommer. Flera av de frågande har varit personer jag aldrig tidigare träffat. Kul att träffa folk som följer Vaxös tillblivelse. När nu dessutom byggandet är i full gång igen kan det väl vara på sin plats med en ny rapport.
Efter rodren, sist i förra rapporten, var det dags för manövreringssystemen; motorer, motormanövrering och rodermanövrering. Valet av radio var redan avgjort. Jag har sedan några år tillbaka en Graupner MC 24 som jag fullbestyckat med extra kanaler och switchfunktioner etc. Den använder jag till alla mina modeller (utom Calypso där det är lite komplicerat att byta ut den befintliga Multiplex installationen i modellen). Det är skönt att i princip ha obegränsat med funktioner, mixermöjligheter och andra inställningar. Med ett stort antal modellminnen och körfaser kan allt ställas in individuellt för många fler modeller än jag någonsin kommer att hinna bygga, och den här lösningen blir på det sättet billigare än om jag skulle ha en mer ”normal” sändare per modell.
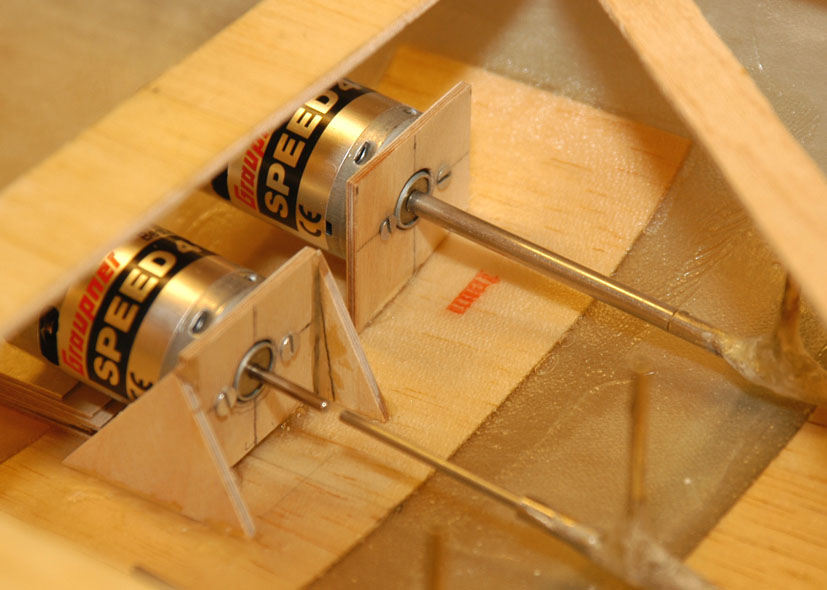
Valet av motorer är alltid en gissning när man bygger en modell som inte finns tidigare. Jag valde standard Speed 400 motorer. De borde räcka i effekt, och var biliga och relativt lätta. Fartreglage var värre. Jag har länge varit starkt kritisk till högfrekventa (HF) reglage i skalamodeller, av skäl jag beskrivit i ”Köregenskaper, del 6” på annan plats här på hemsidan. Men nu hade jag kanske inget val. Mina favoritreglage (ett utgånget från Graupner och ett från Electronize) väger över ett hekto styck. Inte att tänka på för Vaxö. Ett långt samtal med generalagenten för en större tillverkare fick mig att köpa fyra HF reglage, tre reverserande för ytterpropellrarna och bogpropellern, och ett med bara fram för centerpropellern. Min tanke var att genom en mixer vid normal körning styra båda ytterpropellrarna från en spak, och vid avancerande manövrer styra dem individuellt. Så här efteråt kan jag inte fatta att jag i direkt strid mot alla mina tidigare erfarenheter lade ner så mycket pengar på HF reglage, men jag ville så oerhört gärna att det skulle fungera med reglage som bara vägde 20 g styck att jag lät mig övertygas.
Motorerna passas in i linje med propelleraxlarna (se ”Köregenskaper 5”).
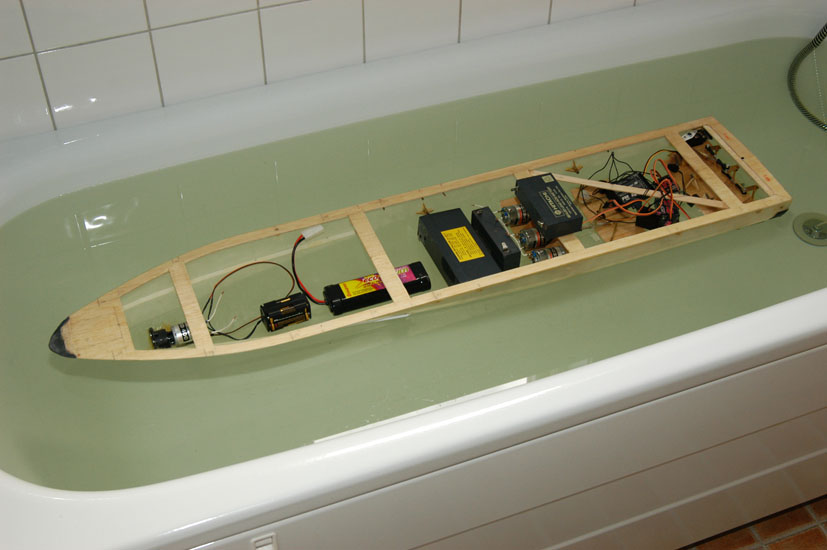
Motorerna monterades, rodermanövreringen byggdes, radioutrustningen fästes på en bädd, drivbatteri och mottagarbatteri lades löst i skrovet, och Vaxö var färdig för ett första trevade test i sitt rätta element. Först ett flyttest i badkaret. Det visade att jag hade en marginal på drygt 1,1 kg för rätt vattenlinje. Det måste räcka för överbyggnaden och övrig teknisk utrustning. Lite knappt, men går förhoppningsvis. I värsta fall kan jag vinna drygt 100 g genom att använda en BEC-krets i fartreglagen istället för mottagarbatteri, och ytterligare nästan 200 g genom att ersätta det planerade 3300mAh NiMH drivbatteriet med Litium.
Flyttest i badkaret. De tre blybatterierna över och framför motorerna är kvarvarande viktmarginal (drygt 1,1 kg).
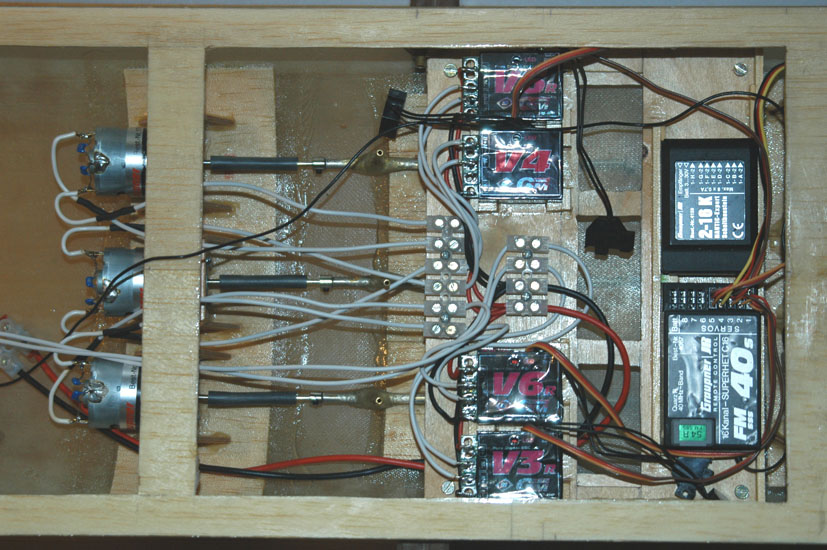
Nästa steg var en provkörning vid klubbens bana i Katrineholm. Den provkörningen visade tre saker. Den första var att skrovet gick mycket fint genom vattnet och att manöverförmågan var god. Den andra var att motorerna var onödigt starka. Det gick på tok för fort till och med utan att använda centerpropellern. Den tredje var att HF reglagen var elände, elände och mer elände. Smygstartegenskaperna var dåliga, vid snabba fram-back omslag (simulerad kajtilläggning i manöverbanan) blockerade reglagen och man fick ta nytt tag med spaken på sändaren, samt ett i mina öron mycket störande tjut så fort jag körde. Värst var att få de båda yttermotorerna att arbeta synkront när jag mixade ihop dem på samma spak. Det är alltid lite individuella skillnader mellan olika kanaler och reglage, som man måste kompensera för. Om inte motorerna slår back exakt samtidigt när man bromsar i kajen så vrider sig modellen och tar i kajen, och så är den dagen förstörd. På andra modeller har jag löst det genom att på sändaren eller fartreglagen spela lite med nollpunkt och lutningen på utslaget, men se det gick inte här. Varje gång fartreglagen slogs på programmerade de in sig själva och ”kompenserade” alla justeringar jag gjort. Hur jag än laborerade var det som borblåst nästa gång jag slog på. Till och med vilket håll som var fram och vilket som var back avgjordes av vart jag först drog respektive spak efter att anläggningen slogs på. Med fyra reglage ger det en checklista för start som närmar sig ett trafikflygplan. Så här kunde jag bara inte ha det. Bekymrad åter till ritbordet!
Första versionen av motor- och radioinstallation. Motorerna och fartreglagen fick bakläxa.
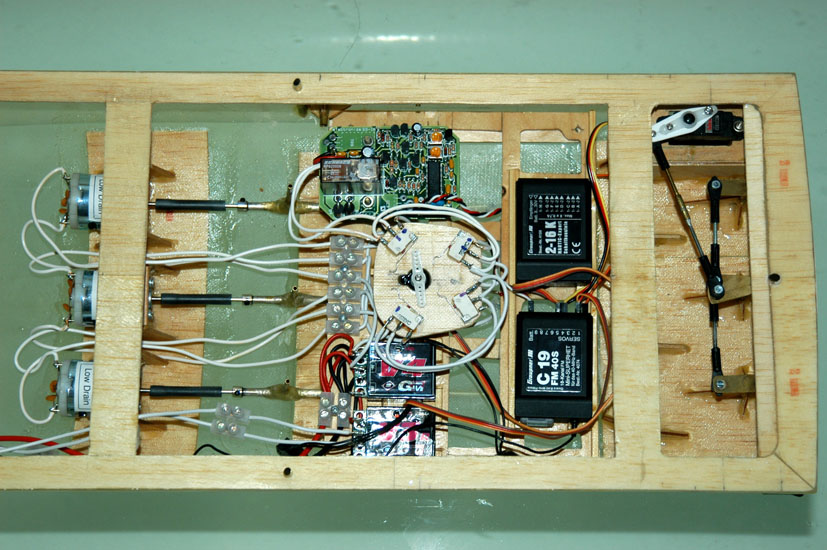
De onödigt starka motorerna var lätt åtgärdat. Ett byte till Electronize 360 motorer gav realistisk toppfart, samtidigt som det sparde lite vikt och sänkte strömförbrukningen. Det senare kan vara välkommet när man måste klara sig på minsta tänkbara drivbatteri. Fartreglagen var mer svårlöst, utom för centermotorn. Den kommer bara att användas vid full fart framåt en bit från bryggan, och då kan jag acceptera både dålig reglering och det tjutande ljudet. Jag pratade igenom mitt problem med folket på Electronize och fick ett glädjande besked. Deras FR-15 reglage, min senaste favorit, skulle klara två av deras 360 motorer även om jag monterade bort kylaren (som står för en stor del av vikten). Sagt och gjort. Utan kylare och kåpa, och med anslutningsledarna utbytta mot klenare dimensioner anpassade till den låga strömmen, väger reglaget nästan exakt lika mycket som de två HF reglage som därmed förpassades till ”kanske-bra-att-ha-lådan”. Men nu kunde jag inte manövrera ytterpropellrarna individuellt. I en tuff förhandling med mig själv kom jag fram till att jag kunde acceptera att vara utan helt individuell styrning, men jag ville absolut kunna köra ena motorn fram och den andra back för att hjälpa till vid skarpa manövrer. Ritbordet igen!
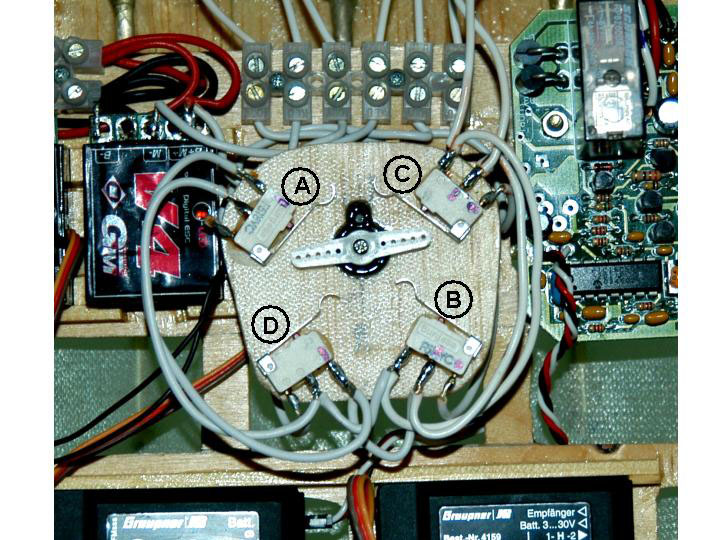
Lösningen blev ett extra servo som påverkar fyra microbrytare (se bild 5). Servot kan via en mixer kopplas till spaken för roderservot. Vid ökat roderutslag påverkas först microbrytare A eller C (beroende på rikting) och stoppar den i svängen inre propellern. Nära fullt roderutslag påverkas även microbrytare B eller D och därmed reverseras den inre propellern. Reverseringsfunktionen kopplas enkelt till eller från genom att slå till eller från mixern. Kopplingsschema för en sådan här reverseringsfunktion, fast då även med reläer för att klara högre motorströmmar, finns i figur 1 i artikeln ”Köregenskaper 3” här på hemsidan. Sätt in microbrytarna där reläerna visas i schemat så blir det exakt den koppling jag gjort i Vaxö. Med microservo, balsalaminatskiva och små microbrytare blev totala vikten ungefär det jag sparade på bytet av motorer. Status quo med andra ord. Återstår problemet med bogpropellern. Där måste jag fortfarande komma ihåg att dra manöverspaken åt rätt håll varje gång jag slår på anläggningen, annars kan jag få reverserad funktion på bogpropellern, och om jag manövrerar den för snabbt fram och tillbaka kommer den att vägra. Måste hitta ett annat fartreglage, som inte väger mer än 20 g…. Några tips?
Andra versionen, som fungerade mycket bättre. Här syns också manövreringen av de tre rodren.
Närbild på reverseringsfunktionen. Till höger är det avskalade fartreglaget för yttermotorerna.
Så långt hade jag kommit i slutet av mars 2005. Nästan hela byggsäsongen hade gått med mycket magert resultat. Eländet med fartreglagen tog kål på motivationen och i kombination med andra trivsamma fritidsaktiviteter ledde det till i stort sett totalt byggstopp. Under perioden mellan maj 2004 och mars 2005 loggade jag totalt sju byggtimmar på Vaxö! Ett ryck i mars resulterade i den ovan beskrivna lösningen för ytterpropellrarna. Motivationen vände åter och det var dags att ta itu med överbyggnaden.
Jag plockade fram det skal till överbyggnaden som beskrivs i rapport nr 2. För att ge stadga, och för att kunna fästa överbyggnaden mot skrovet, fick överbyggnaden en ram i nederkant likadan som den ram i överkant av skrovet som också besktivs i rapport 2. Jag skulle inte limma överbyggnaden mot skrovet. Den ska gå att ta den. Däremot måste den dels ha exakt passform mot skrovet, dels komma i exakt samma läge varje gång man sätter dit den. Överbyggnadsramen gjordes smalare än skrovramen och en sarg i innerkant på den senare ska hindra eventuellt stänkvatten som kommer in mellan ramarna från att rinna in. För att styra överbyggnaden så den kommer i rätt läge gjorde jag fyra styrningar i form av 4/3 mm ytter/innerdiameter rör som limmades fast i skrovramen. Motsvarande rör fast en dimension större, 5/4 mm, limmades in i överbyggnadsramen. Jag fasade topparna på rören i skrovramen så överbyggnaden lätt skulle hitta sitt läge när den sattes på.
Nu gällde det att limma fast överbyggnadsramen i överbyggnaden så ytterkanterna blev helt i linje med skrovet. Jag valde att göra det på plats, på skrovet. Skrovramen täcktes på översidan med en tunn tejp, som också vaxades. Därefter lade jag överbyggnadsramen på plats och klämde den dikt mot skrovramen med klädnypor. Nu tejpade jag fast överbyggnaden i rätt läge mot skrovet, kant i kant. Då överbyggnadens sidor var lite sladdriga klämde jag dem mellan två plywoodskivor så sidorna hölls helt plana under limningen. Därefter fyllde jag springan mellan överbyggnaden och överbyggnadsramen (jag hade sett till att det var en springa på ca 1 mm) med epoxi. Resultatet blev helt perfekt passform. Skrov och överbyggnad passar som gjutna, och det är ju exakt var de är.
Ramen i överbyggnadens underkant plastas fast med både ramen och överbyggnadsskalet fästa mot
skrovet i rätt läge. Plywoodskivor håller överbyggnadens sidor plana medan epoxin härdar.
En av de ganska kraftiga styrningarna som fixerar överbyggnaden i rätt läge mot skrovet.
En sarg ska hindra vatten som eventuellt kommer in mellan ramarna från att rinna in i skrovet.
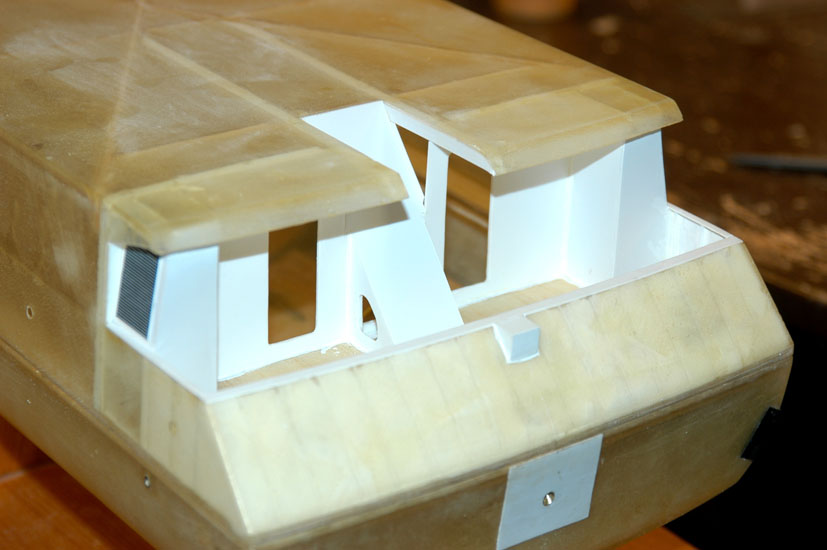
Då var det dags att börja förvandla den tunna epoxistommen till en riktig överbyggnad. Jag började med akterdäck. Hål togs upp i stommen motsvarande öppningen för akterdäck och trappan upp till övre däck. Jag förstärkte övre däck för att ge stadga när jag tog bort sektionen för trappan. Det gjorde jag genom ett ramverk av balkar i styren och balsa/glasfiber/epoxi laminat, limmat under däcket. Därefter byggde jag hela ”inredningen” på akterdäck i styren. Jag använde 1mm, 0,5mm och 0,25 mm styren beroende på hur tunt jag vågade ta för de olika delarna. Viktjakt som vanligt. Akterdäck var väldigt ”pilligt” då öppningen mellan övre däck och relingen på akterdäck är ganska smal. Nästa steg var fördäck och metoden densamma. Här var det lättare att komma åt. Bilderna visar nuläget på båda däcken.
Många vinklar och komplicerade former på akterdäck, och trångt att komma åt.
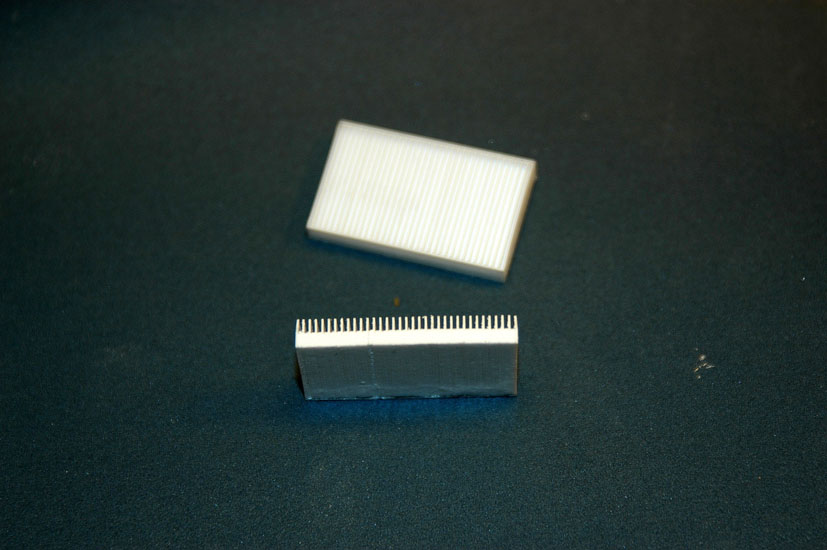
Ventilationsgallren på akterdäcks utsidor byggdes upp av styrenribbor, 2x0,5mm och 4x0,25mm varvat. De målades mattsvart varefter färgen skrapades bort från kanterna på 4x0,25 ribborna (se också föregående bild).
Även fördäck bjöd på mycket styren-knåpande, men här var det bättre plats för fingrarna.
Trots den långa pausen har bygget nu passerat 1000 timmar. Efter flera år med pluggar, formar, och mer eller mindre osynlig mekanik är jag nu framme vid sådant man kommer att se när man tittar på den färdiga modellen. Det känns inspirerande. För tillfället är jag dock i ett återfall till osynlig mekaniken. Bogvisiret ska gå att öppna via radio. Den funktionen hade varit oerhört mycket enklare att åstadkomma om jag byggt fördäck fast på skrovet, och inte som en del av den dentagbara överbyggnaden. Nåväl, vem har sagt att det ska vara lätt… Hur jag löste det (om jag lyckas) får komma i nästa rapport.
Lasse Björkström
2005-07-13